
概要
この記事では、クオータニオンの微分を式と行列の形式で導出する。
その際、以下の記事で述べた内容を前提とするため、適宜参照されたい。


クオータニオンの時間変化
3次元空間での回転を表現する、時間依存のクオータニオン \(\mathbf{q}(t)\) を考える。これによって、3次元空間の点を表現するクオータニオン \(\mathbf{v}=0+\mathbf{\bar{v}}\) を回転した結果、点が \(\mathbf{r}(t)\) に移るとき、この関係は
$$\mathbf{r}(t)=\mathbf{q}(t)\mathbf{v}\mathbf{q}^*(t)$$
と書ける。同様に、微小時間 \(\Delta t\) 経過後は
$$\mathbf{r}(t+\Delta t)=\mathbf{q}(t+\Delta t)\mathbf{v}\mathbf{q}^*(t+\Delta t)$$
となる。ここで、微小時間経過後のクオータニオンを、時刻 \(t\) のクオータニオンを用いて
$$\mathbf{q}(t+\Delta t)=\Delta\mathbf{r}\mathbf{q}(t)$$
と書き、 \(\mathbf{q}(t+\Delta t)\) は \(\mathbf{q}(t)\) による回転を行った後、さらに \(\Delta\mathbf{r}\) の回転を加えたもの、と見る。
\(\mathbf{q}(t)\) による回転を行った後、ベクトル部のみから成るクオータニオン \(\mathbf{\bar{n}}\) によって表現される軸まわりに \(\Delta\alpha\) だけ回転する操作が \(\Delta\mathbf{r}\) に相当すると考えると、この回転は
$$\Delta\mathbf{r}=\cos(\frac{\Delta\alpha}{2})+\mathbf{\bar{n}}\sin(\frac{\Delta\alpha}{2})$$
と表せる。
\(\theta\) が小さい時、 \(\cos\theta\simeq 1, \sin\theta\simeq\theta\) と近似できるので
$$\mathbf{q}(t+\Delta t)=\Delta\mathbf{r}\mathbf{q}(t)\simeq(1+\frac{\Delta\alpha}{2}\mathbf{\bar{n}})\mathbf{q}(t)$$
と書ける。
クオータニオンの時間微分
極限を用いた導出(点を回転するクオータニオン)
クオータニオンの時間微分を
$$\frac{d\mathbf{q}(t)}{dt}=\lim_{\Delta t\to 0}\frac{\mathbf{q}(t+\Delta t)-\mathbf{q}(t)}{\Delta t}$$
と定義すると、
$$\frac{d\mathbf{q}(t)}{dt}=\lim_{\Delta t\to 0}\frac{\Delta\alpha\mathbf{\bar{n}}\mathbf{q}(t)}{2\Delta t}=\frac{1}{2}\left(\lim_{\Delta t\to 0}\frac{\Delta\alpha}{\Delta t}\right)\mathbf{\bar{n}q}(t)=\frac{1}{2}\bar{\boldsymbol{\omega}}\mathbf{q}(t)$$
となる。ここで、 \(\bar{\boldsymbol{\omega}}\) はベクトル部のみから成るクオータニオンであり、点の回転の角速度 \(\omega\) を用いて
$$\boldsymbol{\omega}=0+\bar{\boldsymbol{\omega}}=\omega n_xi+\omega n_yj+\omega n_zk$$
と定義した。以上より、角速度 \(\omega\) で回転する点の回転クオータニオンの微分は
$$\frac{d\mathbf{q}(t)}{dt}=\frac{1}{2}\bar{\boldsymbol{\omega}}\mathbf{q}(t)$$
となる。
微分の行列表現
前項の結果を行列を用いて表すと、
$$\frac{d}{dt}\begin{bmatrix} {q_{0}} \\ {q_{1}} \\ {q_{2}} \\ {q_{3}} \end{bmatrix}=\frac{1}{2}\begin{bmatrix} 0 & -\omega_{1} & -\omega_{2} & -\omega_{3} \\ \omega_{1} & 0 & -\omega_{3} & \omega_{2} \\ \omega_{2} & \omega_{3} & 0 & -\omega_{1} \\ \omega_{3} & -\omega_{2} & \omega_{1} & 0 \end{bmatrix}\begin{bmatrix} {q_{0}} \\ {q_{1}} \\ {q_{2}} \\ {q_{3}} \end{bmatrix}$$
$$=\frac{1}{2}\begin{bmatrix} q_{0} & -q_{1} & -q_{2} & -q_{3} \\ q_{1} & q_{0} & q_{3} & -q_{2} \\ q_{2} & -q_{3} & q_{0} & q_{1} \\ q_{3} & q_{2} & -q_{1} & q_{0} \end{bmatrix}\begin{bmatrix} {0} \\ {\omega_{1}} \\ {\omega_{2}} \\ {\omega_{3}} \end{bmatrix}$$
複素共役クオータニオンの微分
$$\mathbf{q}^*\mathbf{q}=|\mathbf{q}|^2=const$$
より、
$$\frac{d}{dt}[\mathbf{q}^*\mathbf{q}]=0$$
となる。積の微分の関係を用いて
$$\left(\frac{d}{dt}\mathbf{q}^*\right)\mathbf{q}+\mathbf{q}^*\left(\frac{d}{dt}\mathbf{q}\right)=0$$
$$\left(\frac{d}{dt}\mathbf{q}^*\right)\mathbf{q}=-\mathbf{q}^*\left(\frac{d}{dt}\mathbf{q}\right)$$
両辺に右から \(\mathbf{q}^{-1}\) を掛けて
$$\frac{d}{dt}\mathbf{q}^*=-\mathbf{q}^*\left(\frac{d}{dt}\mathbf{q}\right)\mathbf{q}^{-1}$$
より
$$\frac{d}{dt}\mathbf{q}^*=-\frac{1}{2}\mathbf{q}^*\bar{\boldsymbol{\omega}}\mathbf{q}\mathbf{q}^{-1}=-\frac{1}{2}\mathbf{q}^*\bar{\boldsymbol{\omega}}$$
行列を用いて表記すると
$$\frac{d}{dt}[\mathbf{q}^*(t)]=-\frac{1}{2}\begin{bmatrix} 0 & \omega_1 & \omega_2 & \omega_3 \\ \omega_1 & 0 & -\omega_3 & \omega_2 \\ \omega_2 & \omega_3 & 0 & -\omega_1 \\ \omega_3 & -\omega_2 & \omega_1 & 0 \end{bmatrix}\begin{bmatrix} q_0 \\ q_1 \\ q_2 \\ q_3 \end{bmatrix}$$
$$=-\frac{1}{2}\begin{bmatrix} q_0 & q_1 & q_{2} & q_{3} \\ -q_{1} & q_0 & q_3 & -q_{2} \\ -q_{2} & -q_{3} & q_0 & q_{1} \\ -q_{3} & q_{2} & -q_{1} & q_0 \end{bmatrix}\begin{bmatrix} 0 \\ \omega_{1} \\ \omega_{2} \\ \omega_{3} \end{bmatrix}$$
となる。
座標を回転するクオータニオンの微分
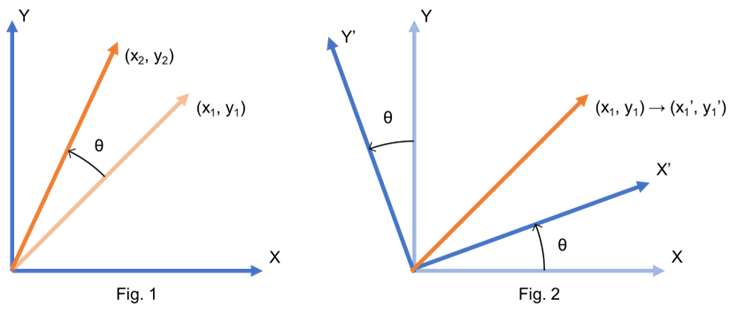
点を回転する場合(Fig. 1)と同じクオータニオンを用いて座標を回転する(Fig. 2)操作は、
$$\mathbf{r}(t)=\mathbf{q}^*(t)\mathbf{v}\mathbf{q}(t)$$
$$\mathbf{r}(t+\Delta t)=\mathbf{q}^*(t+\Delta t)\mathbf{v}\mathbf{q}(t+\Delta t)$$
と書けるため、
$$\mathbf{q}(t+\Delta t)=\mathbf{q}(t)\Delta\mathbf{r}$$
と置いて同様の操作を行い、
$$\frac{d\mathbf{q}(t)}{dt}=\frac{1}{2}\mathbf{q}(t)\bar{\boldsymbol{\omega}}$$
となる。また、複素共役クオータニオンの微分は
$$\frac{d}{dt}\mathbf{q}^*=-\frac{1}{2}\bar{\boldsymbol{\omega}}\mathbf{q}^*$$
である。行列で表記すると
$$\frac{d}{dt}\begin{bmatrix} {q_{0}} \\ {q_{1}} \\ {q_{2}} \\ {q_{3}} \end{bmatrix}=\frac{1}{2}\begin{bmatrix} 0 & -\omega_{1} & -\omega_{2} & -\omega_{3} \\ \omega_{1} & 0 & \omega_{3} & -\omega_{2} \\ \omega_{2} & -\omega_{3} & 0 & \omega_{1} \\ \omega_{3} & \omega_{2} & -\omega_{1} & 0 \end{bmatrix}\begin{bmatrix} {q_{0}} \\ {q_{1}} \\ {q_{2}} \\ {q_{3}} \end{bmatrix}$$
$$=\frac{1}{2}\begin{bmatrix} q_{0} & -q_{1} & -q_{2} & -q_{3} \\ q_{1} & q_{0} & -q_{3} & q_{2} \\ q_{2} & q_{3} & q_{0} & -q_{1} \\ q_{3} & -q_{2} & q_{1} & q_{0} \end{bmatrix}\begin{bmatrix} {0} \\ {\omega_{1}} \\ {\omega_{2}} \\ {\omega_{3}} \end{bmatrix}$$
$$\frac{d}{dt}[\mathbf{q}^*(t)]=-\frac{1}{2}\begin{bmatrix} 0 & \omega_1 & \omega_2 & \omega_3 \\ \omega_1 & 0 & \omega_3 & -\omega_2 \\ \omega_2 & -\omega_3 & 0 & \omega_1 \\ \omega_3 & \omega_2 & -\omega_1 & 0 \end{bmatrix}\begin{bmatrix} q_0 \\ q_1 \\ q_2 \\ q_3 \end{bmatrix}$$
$$=-\frac{1}{2}\begin{bmatrix} q_0 & q_1 & q_{2} & q_{3} \\ -q_{1} & q_0 & -q_3 & q_{2} \\ -q_{2} & q_{3} & q_0 & -q_{1} \\ -q_{3} & -q_{2} & q_{1} & q_0 \end{bmatrix}\begin{bmatrix} 0 \\ \omega_{1} \\ \omega_{2} \\ \omega_{3} \end{bmatrix}$$
と書ける。
Comments